PhRoCiety
SLO: Metode vodenja za varno fizično interakcijo med človekom in robotom
Cilj projekta PhRoCietyje izboljšanje kognitivnega razumevanja in umetne inteligence robotov in sistemov vodenja pri kooperativnem in robustnem več-kontaktnem fizičnem sodelovanju med agenti, kjer so agenti lahko ljudje ali roboti. Projekt PROciety bo presegel tradicionalne pristope vodenja in modeliranja z: (1) razvojem novih metodologij vodenja, ki bodo omogočala izvajanje kooperativnih nalog z več agenti naprimer človek-robot ali robot-robot; (2) z združevanjem kognitivnega učenja, umetne inteligence in fizične interakcije s predvidljivimi in nepredvidljivimi dogodki; ter (3) validacijo teoretičnega napredka na realnih sistemih in interaktivnih scenarijih, ki vključujejo fizično interakcijo.
ENG: Towards Cooperative Robot Behaviors in Physical Human-Robot Interaction Scenarios
The aim of PhRoCiety is to advance cognitive understanding and the current control about cooperative and robust multi-contact physical interaction between multiple agents, where agents are humans or robots. PhRoCiety will go beyond traditional approaches by: (1) proposing novel control methodologies for performing cooperative tasks with multiple agents in physical human-robot or robot-robot interaction scenarios; (2) combining cognitive learning and physical interaction with predictable and unpredictable events; (3) validating theoretical advances in real-world physical interactive scenarios.
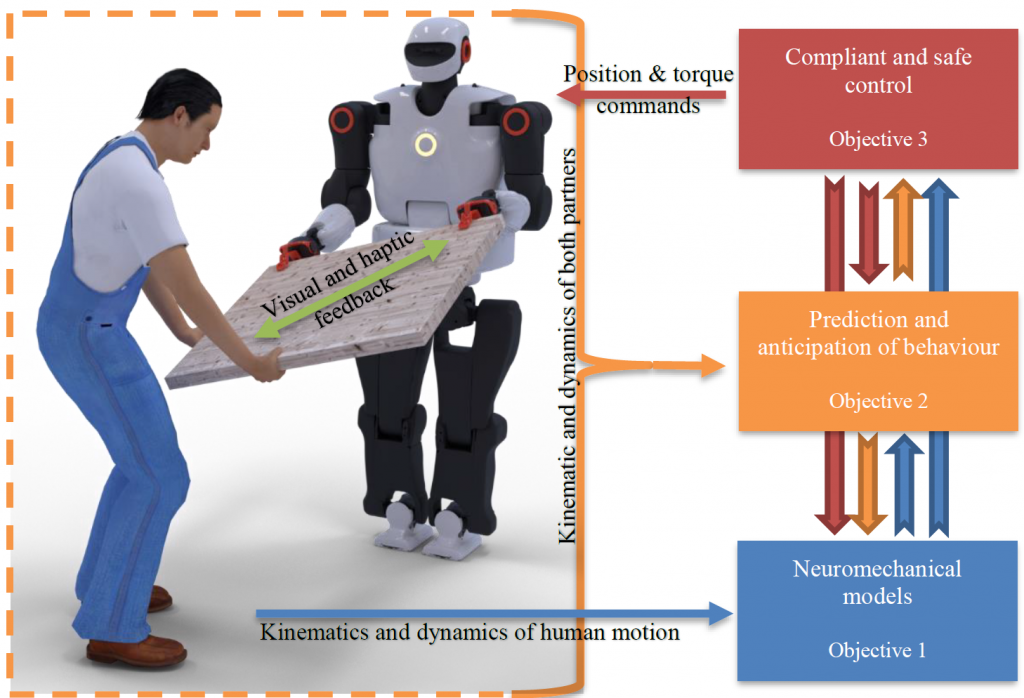
S kombinacijo razvoja teh metod bo PhRoCietyprvič razvil napredne metode vodenja, ki bodo temeljile na človeških nevromehanskih modelih. S tem bo PROciety omogočil robotom samostojno učenje in izvajanje nalog skupaj s partnerjem na kolaborativen a hkrati neinvaziven način. Poleg razvoja metod vodenja je eden izmed ciljev projekta tudi raziskati in razviti nevromehanske modele sodelovanja med partnerji pri ljudeh.
Firstly, PhRoCiety will advance state-of-the-art in the way robots learn and perform cooperative tasks, by developing new tools for learning predictive models of human dynamic behavior in collaborative scenarios. Here the aim is to study neuromechanical parameters of human-human collaborative behaviors.
Drugič, v okviru projekta PhRoCietybomo razvili nov koncept vodenja, ki bo inovativno spremenil robotsko tehnologijo za pomoč ljudem pri izvajanju fizičnih nalog. Z merjenjem in modeliranjem človeške dinamike v scenarijih, kjer sodelujeta dva človeka, bo PROciety lahko še napredoval pri razvoju avtonomnih robotskih partnerjev, ki sodelujejo z ljudmi z namenom, da zagotovijo dodatno pomoč, delajo skupaj z ljudmi kot vrstniki, se učijo od ljudi kot vajenci in spodbujajo ljudi k večji vključenosti skozi fizično interakcijo med njimi.
Secondly, PhRoCiety will propose a novel control framework that will innovate the robotic technology for assisting humans performing physical collaborative tasks. By measuring and modeling human dynamics in human-human collaborative setups, PhRoCiety will advance the state-of-the art in autonomous robot companions that interact with humans to provide assistance, work alongside with humans as peers, learn from humans as apprentices, and foster more engaging physical interaction between them.
Tretjič, PhRoCietybo dosegel nove dosežke tudi na področjih implementacije razvitih sistemov vodenj na realnih sistemih, ter s tem potrditev razvitih metod v realnih scenarijih. Skozi pridobljene rezultate bomo pokazali, kako lahko izkoristitimo robotsko tehnologijo za kooperativno partnerstvo med robotom in človekom ter s tem povečamo kognitivnost robotskih sistemov in produktivnost pri izvajanju kooperativnih nalog, kjer je potreba fizična interakcija.
Thirdly, another achievement of PhRoCiety will be the validation of methods in real-world scenarios. The evaluations will show robots exploiting cooperative partnership with humans for cognitive learning and utilizing assistive physical interaction.
interaction scenario.
Publikacije
Journal Articles
Leader-Follower Dynamics in Complex Obstacle Avoidance Task Journal Article
In: arXiv preprint arXiv:2207.04791, 2022.
Leader–Follower Role Allocation for Physical Collaboration in Human Dyads Journal Article
In: Applied Sciences, vol. 11, no. 19, 2021, ISSN: 2076-3417.
End-effector Cartesian stiffness shaping - sequential least squares programming approach Journal Article
In: Serbian Journal of Electrical Engineering, vol. 18, no. 1, pp. 1–14, 2021, ISSN: 1451-4869.
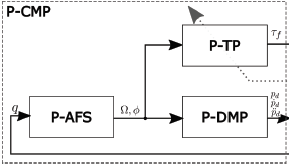
Phase-Synchronized Learning of Periodic Compliant Movement Primitives (P-CMPs) Journal Article
In: Frontiers in Neurorobotics, vol. 14, pp. 90, 2020, ISSN: 1662-5218.
Proceedings Articles
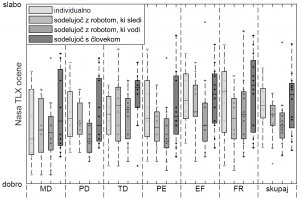
Increased Complexity of a Human-Robot Collaborative Task May Increase the Need for a Socially Competent Robot Proceedings Article
In: 2022 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), pp. 1-6, 2022.
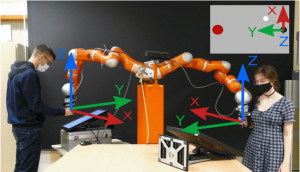
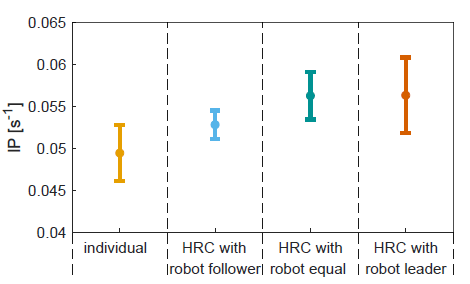
Humans Prefer Collaborating with a Robot Who Leads in a Physical Human-Robot Collaboration Scenario Proceedings Article
In: 2021 20th International Conference on Advanced Robotics (ICAR), pp. 935-941, 2021.
Turing test of motor ability perception in physical collaboration between a human and an intelligent robot agent Proceedings Article
In: Andrej Žemva, Trost (Ed.): Proceedings of the Twenty-ninth International Electrotechnical and Computer Science Conference ERK 2020, 2020, ISBN: 2591-0442, 29.
Combining Virtual and Physical Guides for Autonomous In-Contact Path Adaptation Proceedings Article
In: Zeghloul, Said; Laribi, Med Amine; Arevalo, Juan Sebastian Sandoval (Ed.): Advances in Service and Industrial Robotics, pp. 181–189, Springer International Publishing, Cham, 2020, ISBN: 978-3-030-48989-2.
Dyadic Human-Human Interactions in Reaching Tasks: Fitts' Law for Two Proceedings Article
In: Zeghloul, Said; Laribi, Med Amine; Arevalo, Juan Sebastian Sandoval (Ed.): Advances in Service and Industrial Robotics, pp. 199–207, Springer International Publishing, Cham, 2020, ISBN: 978-3-030-48989-2.
Sodelujoče raziskovalne organizacije:
Sestava projektne skupine:
| Members | COBISS ID | Role | Period |
| Petrič Tadej | 30885 | PI | 2019- 2021 |
| Nemec Bojan | 118 | Researcher | 2019- 2021 |
| Brecelj Tilen | 37467 | Researcher | 2020- 2021 |
| Simonič Mihael | 51693 | Researcher | 2019- 2021 |
| Kropivšek Leskovar Rebeka | 53766 | Technician | 2019- 2021 |
Vsebinski opis projekta
Founding source

ARRS grant no.: N2-0130