Projects
Ongoing:
PNEU-MATE – PNEUmatic Multi-joint Actuation Technologies in Exoskeleltons
ARIS
(no.: J2-70088)
PNEU-MATE aims to redefine wearable robotics by developing an innovative, bio-inspired, multi-articular
exoskeleton system, pushing the boundaries of the state-of-the-art technological advances in this field. By redetermining
the strategies for energy storage, transfer, and release through innovative pneumatic actuators and
advanced control algorithms, the project seeks to re-establish the understanding of efficiency, adaptability, and
performance in dynamic, multi-joint exoskeleton systems.
Project coordinator: Prof. Dr. Tadej Petrič
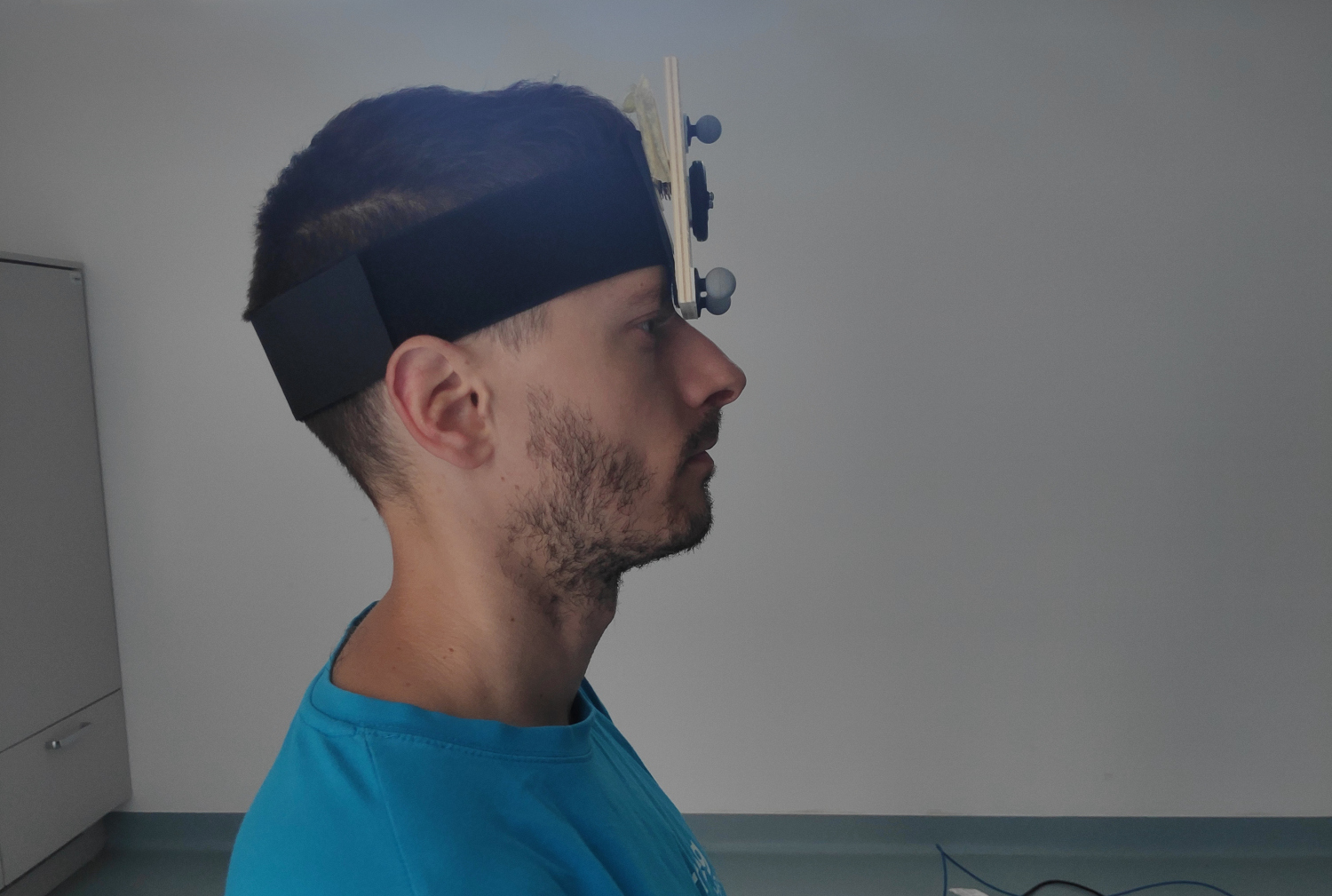
BiMoNeck – Biomechanical Model of Head and Neck with Motor-Controlled Motion
ARIS
(no.: J2-60036)
Cervical dystonia, a prevalent focal dystonia affecting 5 to 30 individuals per 100,000, is a complex neurological disorder marked by involuntary muscle contractions, spasms, and tremors that disrupt daily activities. Despite the widespread use of Botulinum toxin injections, their effectiveness (58–90%) is limited due to the lack of tools for precise muscle identification, as current methods rely solely on clinical judgment. To address this gap, this project will develop a dynamic biomechanical head-neck model encompassing the cervical spine (C1-C7), intervertebral discs, ligaments, muscles, and skull, with bones modeled as rigid bodies, discs and ligaments as elastic elements, and muscles as actuators. Motion capture and electromyography data, combined with AI learning algorithms, will validate the model, enabling accurate simulation of neck motion and muscle activation. This approach will revolutionize cervical dystonia treatment by facilitating precise muscle targeting, improving therapeutic efficacy, and enabling personalized rehabilitation and preventive measures.
PI: Dr. Tilen Brecelj (JSI)
DIGITOP – Digital transformation of robot-supported factories of the future
The project is co-financed by the Republic of Slovenia, the Ministry of Higher Education, Science and innovations, Slovenian Research and Innovation Agency and the European Union – NextGenerationEu.
The main goal of the DIGITOP program is the introduction of advanced digital technologies, such as robotics, artificial intelligence (AI), information and communication technologies (ICT), Industry 4.0 and 5.0, into manufacturing companies for the automation and optimization of production processes.
The program includes nine research and development projects (R&D), which are at various stages of technological readiness, and focuses on the theme of digital transition and strategic autonomy.
The goal of the program is to maintain industrial production in Slovenia and the EU, with research organizations and industrial partners participating, who partially support the research with their own resources.
Project coordinator: Prof. Dr. Aleš Ude
Past projects

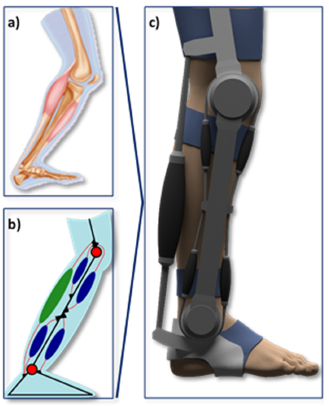
JSI-KneExo – Pneumatic Knee Exoskeleton with Integrated Air Tank and Variable Stiffness
The project JSI-KneExo is carried out as part of the research program Automation, Robotics and Biocybernetics, funded by the Slovenian Research and Innovation Agency (ARIS).
The aim of the project is to develop a novel wearable robotic joint for the knee that combines pneumatic actuation with an integrated air reservoir and adjustable stiffness. The design enables energy-efficient and untethered assistance, operating in both active and quasi-passive modes to support natural movement during activities such as walking and standing up.
By integrating lightweight structures, soft robotic principles, and intelligent control strategies, JSI-KneExo contributes to the advancement of hybrid wearable systems for lower-limb support in rehabilitation, ergonomics, and human augmentation.
Project coordinator: Prof. Dr. Tadej Petrič
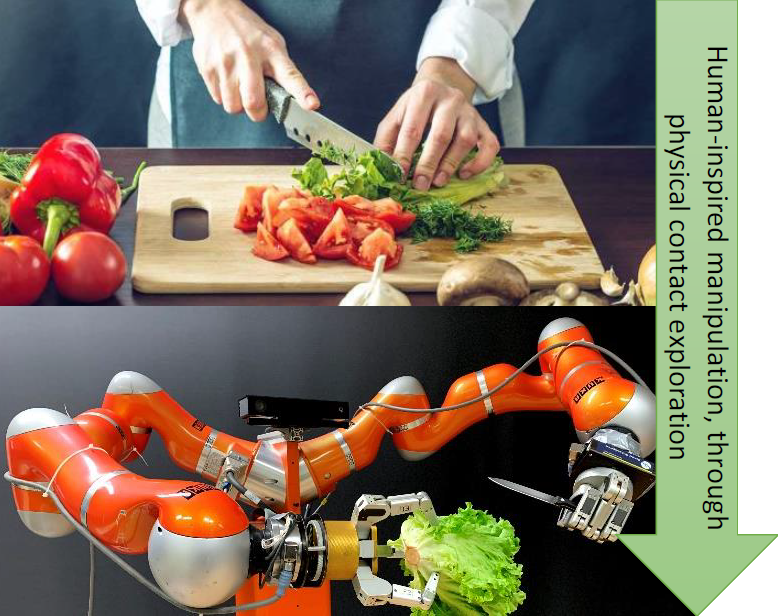
BodyCoM – Rethinking Dynamic Whole-body Multicontact Interaction: Towards Next Generation of Collaborative Robots
ARRS
(no.: N2-0269)
The goal of BodyCoM is to explore how multi-contact interactions can improve the performance of a new generation of robots through several innovative phases of research and development. First, we will analyse how humans use the environment to improve their skills in accuracy and endurance. Second, we will extend the control components to enable whole-body contact. Third, we will develop a novel motor-primitive control architecture to enable goal-directed multi-contact interaction that accelerates the learning of compliant behaviours.
PI: Prof. Dr. Tadej Petric (JSI)

SWITCH – Learning by Switching Roles in Physical Human-Robot Collaboration
Bilateral project SNSF/ARRS
(no.: N2-0153)
In physical human-robot collaboration, robots currently face a shortcoming due to their limitations in observing and adapting to human dynamics. This further results in inefficient collaboration and unergonomic interaction. SWITCH will address this shortcoming by developing methods that can efficiently observe human dynamics in real-time and learn anticipatory models from a demonstration. First, we will collect several datasets of force and motion capture data for a human-human standing up task. We will then develop models that can learn the behaviors of the two agents (assistant and assisted) in a probabilistic fashion. These models will be exploited for the on-line control of robots with reactive and anticipative capabilities.
PIs: Dr Sylvain Calinon (Idiap) & Doc. Dr. Tadej Petric (JSI)

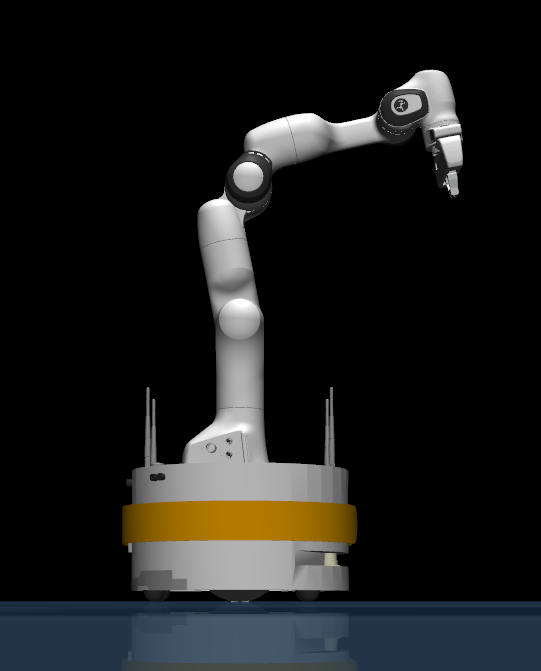
CoBoTaT – Laboratory for Advancing Collaborative Robot Behaviors in Physical Human-Robot Interaction Scenarios
JSI DIRECTOR’S FUND
Recent technology developments enable robots to safely share a common workspace with humans. Europe is currently leading the robotic market for safety-certified robots by providing tools that can react to unintentional contacts. CoBoTaT will leverage these technologies and strengthen the position of JSI in Europe by developing a fully sensorized laboratory environment for studying human-robot collaboration, enabling us to enhance robots’ capabilities of learning, working and assisting people in their natural environments. By exploiting this environment, CoBoTaT will generate novel technological and scientific breakthroughs. This will have a positive social impact on humans by improving the assistive capabilities of robots for applications such as household keeping, assistance in working environments, and even elderly care.
PI: Doc. Dr. Tadej Petric (JSI)

PhRoCiety – Collaborative Capabilities in Physical Human-Robot Interaction Scenarios
ARRS
(no.: N2-0130)
The aim of PhRoCiety is to advance cognitive understanding and the current control about cooperative and robust multi-contact physical interaction between multiple agents, where agents are humans or robots. PhRoCiety will go beyond traditional approaches by: (1) proposing novel control methodologies for performing cooperative tasks with multiple agents in physical human-robot or robot-robot interaction scenarios; (2) combining cognitive learning and physical interaction with predictable and unpredictable events; (3) validating theoretical advances in real-world physical interactive scenarios.
PI: Doc. Dr. Tadej Petric (JSI)

Generation and Learning of Adaptive Cyclic Movements in Assist-As-Needed Applications for Human-Robot Interaction
In the scope of this project, we strengthen the connections between our group and the group at the Johannes Kepler University in Linz.
PIs: Univ.-Prof. Dr.-Ing. habil. Andreas Müller (JKU) & Doc. Dr. Tadej Petric (JSI)

Establishing new tools to facilitate new generation humanoid robot capabilities for collaborative human-robot object manipulation
In the scope of this project, we strengthen the connections between our group and the group at the University of Belgrade, Faculty of Electrical Engineering.
PIs: Asst. Prof. Kosta Jovanovic (JKU) & Doc. Dr. Tadej Petric (JSI)