Rethinking Dynamic Whole-body Multicontact Interaction: Towards Next Generation of Collaborative Robots
Due to the safety requirements and affordability that collaborative robots must meet, a major shortcoming of such robots has become accuracy and payload capacity. BodyCon will address this shortcoming by exploring how robots can exploit whole-body contacts to improve their performance such as positioning accuracy, repeatability, payload capacity and speed.
Humans have an amazing ability to manipulate various objects by exploiting physical contact. Can a robot achieve better object manipulation if it learns to exploit physical interactions with multiple contacts, such as bracing its elbows against the environment? Humans do the same, for accurate manipulation they tend to brace their forearms against the environment. In robotics, this way of using the environment to improve manipulation performance has not been explored before, primarily because robots were rigid and did not allow or require whole-body contacts. However, the advent of new lightweight structures and torque sensors has led to the rapid proliferation of collaborative robots in many different fields. Additional research is needed to bring their capabilities in line with what is typically desired and expected from robots, especially in high accuracy tasks. The goal of BodyCoM is to explore how multi-contact interactions can improve the performance of a new generation of robots through several innovative phases of research and development. First, we will analyse how humans use the environment to improve their skills in accuracy and endurance. Second, we will extend the control components to enable whole-body contact. Third, we will develop a novel motor-primitive control architecture to enable goal-directed multi-contact interaction that accelerates the learning of compliant behaviours. With the consolidation of robotics methods developed at the host department and the expertise of PI in physical human-robot interaction, BodyCoM has a unique predisposition to break new ground in the cognitive exploitation of environmental contacts and constraints. The expected project outcome will demonstrate how robots use whole-body multi-contact interaction for efficient and precise manipulation.
@article{tsuji2025surveyimitationlearningcontactrich,
title = {A Survey on Imitation Learning for Contact-Rich Tasks in Robotics},
author = {Toshiaki Tsuji and Yasuhiro Kato and Gokhan Solak and Heng Zhang and Tadej Petrič and Francesco Nori and Arash Ajoudani},
url = {https://arxiv.org/abs/2506.13498},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{Knezevic2024,
title = {A Geometric Approach to Task-Specific Cartesian Stiffness Shaping},
author = {Nikola Knežević and Branko Lukić and Tadej Petrič and Kosta Jovanovič},
doi = {10.1007/s10846-023-02035-6},
issn = {15730409},
year = {2024},
date = {2024-01-01},
journal = {Journal of Intelligent and Robotic Systems: Theory and Applications},
volume = {110},
number = {1},
abstract = {Controlling the exact Cartesian stiffness values of a robot end-effector (EE) is troublesome because of difficulties associated with estimating the stiffness and controllability of a full Cartesian stiffness matrix. However, most practical applications require only quantitative (high/low) stiffness values in the EE motion direction (or perpendicular direction). Full control of the stiffness matrix requiring too many control inputs which is hardly possible in practical applications. To ensure the efficiency of execution for a range of redundant robots, we present an algorithm for shaping a robot's Cartesian stiffness ellipsoid, a more intuitive and visual stiffness representation, using a nonlinear sequential least square programming optimization. The algorithm is designed to optimize the joint stiffness values and the trajectory of the robot's joints, using null-space exploration, for a given task. Using eigenvalue decomposition of the stiffness matrix, the algorithm minimizes the orientation difference between the major axis of the current and the desired stiffness ellipsoid and specify a scaling factor between the major and the minor axis. The presented approach allows the user to better understand and control of a robot, regardless of the user's knowledge of the achievable stiffness range and the interdependencies of the Cartesian stiffness matrix elements.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Controlling the exact Cartesian stiffness values of a robot end-effector (EE) is troublesome because of difficulties associated with estimating the stiffness and controllability of a full Cartesian stiffness matrix. However, most practical applications require only quantitative (high/low) stiffness values in the EE motion direction (or perpendicular direction). Full control of the stiffness matrix requiring too many control inputs which is hardly possible in practical applications. To ensure the efficiency of execution for a range of redundant robots, we present an algorithm for shaping a robot's Cartesian stiffness ellipsoid, a more intuitive and visual stiffness representation, using a nonlinear sequential least square programming optimization. The algorithm is designed to optimize the joint stiffness values and the trajectory of the robot's joints, using null-space exploration, for a given task. Using eigenvalue decomposition of the stiffness matrix, the algorithm minimizes the orientation difference between the major axis of the current and the desired stiffness ellipsoid and specify a scaling factor between the major and the minor axis. The presented approach allows the user to better understand and control of a robot, regardless of the user's knowledge of the achievable stiffness range and the interdependencies of the Cartesian stiffness matrix elements.
@article{s24217006,
title = {Leveraging Environmental Contact and Sensor Feedback for Precision in Robotic Manipulation},
author = {Jan Šifrer and Tadej Petrič},
url = {https://www.mdpi.com/1424-8220/24/21/7006},
doi = {10.3390/s24217006},
issn = {1424-8220},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Sensors},
volume = {24},
number = {21},
abstract = {This paper investigates methods that leverage physical contact between a robot’s structure and its environment to enhance task performance, with a primary emphasis on improving precision. Two main approaches are examined: solving the inverse kinematics problem and employing quadratic programming, which offers computational efficiency by utilizing forward kinematics. Additionally, geometrical methods are explored to simplify robot assembly and reduce the complexity of control calculations. These approaches are implemented on a physical robotic platform and evaluated in real-time applications to assess their effectiveness. Through experimental evaluation, this study aims to understand how environmental contact can be utilized to enhance performance across various conditions, offering valuable insights for practical applications in robotics.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This paper investigates methods that leverage physical contact between a robot’s structure and its environment to enhance task performance, with a primary emphasis on improving precision. Two main approaches are examined: solving the inverse kinematics problem and employing quadratic programming, which offers computational efficiency by utilizing forward kinematics. Additionally, geometrical methods are explored to simplify robot assembly and reduce the complexity of control calculations. These approaches are implemented on a physical robotic platform and evaluated in real-time applications to assess their effectiveness. Through experimental evaluation, this study aims to understand how environmental contact can be utilized to enhance performance across various conditions, offering valuable insights for practical applications in robotics.
@article{Petric2023,
title = {Kinematic model calibration of a collaborative redundant robot using a closed kinematic chain},
author = {Tadej Petrič and Leon Žlajpah},
url = {https://doi.org/10.1038/s41598-023-45156-6},
doi = {10.1038/s41598-023-45156-6},
issn = {20452322},
year = {2023},
date = {2023-01-01},
journal = {Scientific Reports},
volume = {13},
number = {1},
pages = {1--12},
publisher = {Nature Publishing Group UK},
abstract = {In this paper, we propose a novel approach for the kinematic calibration of collaborative redundat robots, focusing on improving their precision using a cost-effective and efficient method. We exploit the redundancy of the closed-loop kinematic chain by utilizing a spherical joint, enabling precise definition of the robot end-effector position while maintaining free joint motion in the null space. Leveraging the availability of joint torque sensors in most collaborative robots, we employ a kinesthetic approach to obtain constrained joint motion for calibration. An optimization approach is utilized to determine the optimal kinematic parameters based on measured joint positions and a constrained end-effector position defined by the spherical joint. The effectiveness of the proposed method is demonstrated and validated on the Franka Emika Panda robot, a 7-DoF robot. Results indicate a significant enhancement in absolute accuracy, with comparable performance to more expensive sensor systems such as optical measurement systems. Our approach offers a practical and cost-effective solution for improving the precision of collaborative robots.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
In this paper, we propose a novel approach for the kinematic calibration of collaborative redundat robots, focusing on improving their precision using a cost-effective and efficient method. We exploit the redundancy of the closed-loop kinematic chain by utilizing a spherical joint, enabling precise definition of the robot end-effector position while maintaining free joint motion in the null space. Leveraging the availability of joint torque sensors in most collaborative robots, we employ a kinesthetic approach to obtain constrained joint motion for calibration. An optimization approach is utilized to determine the optimal kinematic parameters based on measured joint positions and a constrained end-effector position defined by the spherical joint. The effectiveness of the proposed method is demonstrated and validated on the Franka Emika Panda robot, a 7-DoF robot. Results indicate a significant enhancement in absolute accuracy, with comparable performance to more expensive sensor systems such as optical measurement systems. Our approach offers a practical and cost-effective solution for improving the precision of collaborative robots.
@article{zlajpah2022,
title = {Kinematic calibration for collaborative robots on a mobile platform using motion capture system},
author = {Leon Žlajpah and Tadej Petrič},
url = {https://www.sciencedirect.com/science/article/pii/S0736584522001296},
doi = {https://doi.org/10.1016/j.rcim.2022.102446},
issn = {0736-5845},
year = {2022},
date = {2022-09-01},
journal = {Robotics and Computer-Integrated Manufacturing},
volume = {79},
pages = {102446},
abstract = {For modern robotic applications that go beyond the typical industrial environment, absolute accuracy is one of the key properties that make this possible. There are several approaches in the literature to improve robot accuracy for a typical industrial robot mounted on a fixed frame. In contrast, there is no method to improve robot accuracy when the robot is mounted on a mobile base, which is typical for collaborative robots. Therefore, in this work, we proposed and analyzed two approaches to improve the absolute accuracy of the robot mounted on a mobile platform using an optical measurement system. The first approach is based on geometric operations used to calculate the rotation axes of each joint. This approach identifies all rotational axes, which allows the calculation of the Denavit–Hartenberg (DH) parameters and thus the complete kinematic model, including the position and orientation errors of the robot end-effector and the robot base. The second approach to parameter estimation is based on optimization using a set of joint positions and end-effector poses to find the optimal DH parameters. Since the robot is mounted on a mobile base that is not fixed, an optical measurement system was used to dynamically and simultaneously measure the position of the robot base and the end-effector. The performance of the two proposed methods was analyzed and validated on a 7-DoF Franka Emika Panda robot mounted on a mobile platform PAL Tiago-base. The results show a significant improvement in absolute accuracy for both proposed approaches. By using the proposed approach with the optical measurement system, we can easily automate the estimation of robot kinematic parameters with the aim of improving absolute accuracy, especially in applications that require high positioning accuracy.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
For modern robotic applications that go beyond the typical industrial environment, absolute accuracy is one of the key properties that make this possible. There are several approaches in the literature to improve robot accuracy for a typical industrial robot mounted on a fixed frame. In contrast, there is no method to improve robot accuracy when the robot is mounted on a mobile base, which is typical for collaborative robots. Therefore, in this work, we proposed and analyzed two approaches to improve the absolute accuracy of the robot mounted on a mobile platform using an optical measurement system. The first approach is based on geometric operations used to calculate the rotation axes of each joint. This approach identifies all rotational axes, which allows the calculation of the Denavit–Hartenberg (DH) parameters and thus the complete kinematic model, including the position and orientation errors of the robot end-effector and the robot base. The second approach to parameter estimation is based on optimization using a set of joint positions and end-effector poses to find the optimal DH parameters. Since the robot is mounted on a mobile base that is not fixed, an optical measurement system was used to dynamically and simultaneously measure the position of the robot base and the end-effector. The performance of the two proposed methods was analyzed and validated on a 7-DoF Franka Emika Panda robot mounted on a mobile platform PAL Tiago-base. The results show a significant improvement in absolute accuracy for both proposed approaches. By using the proposed approach with the optical measurement system, we can easily automate the estimation of robot kinematic parameters with the aim of improving absolute accuracy, especially in applications that require high positioning accuracy.
@article{doi:10.1177/02783649261417694,
title = {A survey on imitation learning for contact-rich tasks in robotics},
author = {Toshiaki Tsuji and Yasuhiro Kato and Gokhan Solak and Heng Zhang and Tadej Petrič and Francesco Nori and Arash Ajoudani},
url = {https://doi.org/10.1177/02783649261417694},
doi = {10.1177/02783649261417694},
journal = {The International Journal of Robotics Research},
volume = {0},
number = {0},
pages = {02783649261417694},
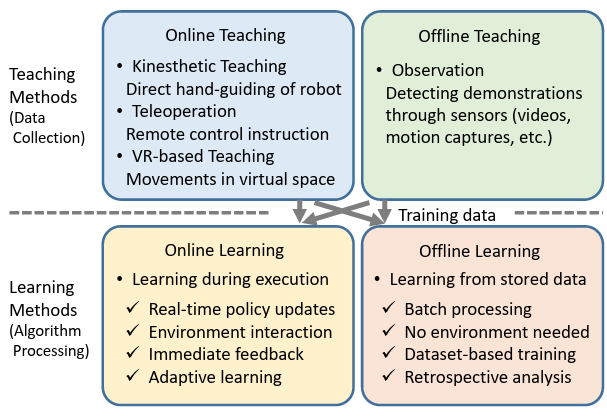
abstract = {This paper comprehensively surveys research trends in imitation learning (IL) for contact-rich robotic tasks. Contact-rich tasks, which require complex physical interactions with the environment, represent a central challenge in robotics due to their nonlinear dynamics and sensitivity to small positional deviations. The paper examines demonstration collection methodologies, including teaching methods and sensory modalities crucial for capturing subtle interaction dynamics. We then analyze IL approaches, highlighting their applications to contact-rich manipulation. Recent advances in multimodal learning and foundation models have significantly enhanced performance in complex contact tasks across industrial, household, and healthcare domains. Through systematic organization of current research and identification of challenges, this survey provides a foundation for future advancements in contact-rich robotic manipulation.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This paper comprehensively surveys research trends in imitation learning (IL) for contact-rich robotic tasks. Contact-rich tasks, which require complex physical interactions with the environment, represent a central challenge in robotics due to their nonlinear dynamics and sensitivity to small positional deviations. The paper examines demonstration collection methodologies, including teaching methods and sensory modalities crucial for capturing subtle interaction dynamics. We then analyze IL approaches, highlighting their applications to contact-rich manipulation. Recent advances in multimodal learning and foundation models have significantly enhanced performance in complex contact tasks across industrial, household, and healthcare domains. Through systematic organization of current research and identification of challenges, this survey provides a foundation for future advancements in contact-rich robotic manipulation.
@inproceedings{10.1007/978-3-032-02106-9_17,
title = {Sensor-Based Contact Point Estimation for Extended Robotic Structures},
author = {Jan Šifrer and Tadej Petrič},
editor = {Kosta Jovanović and Aleksandar Rodić and Mirko Raković},
isbn = {978-3-032-02106-9},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {Advances in Service and Industrial Robotics},
pages = {147–154},
publisher = {Springer Nature Switzerland},
address = {Cham},
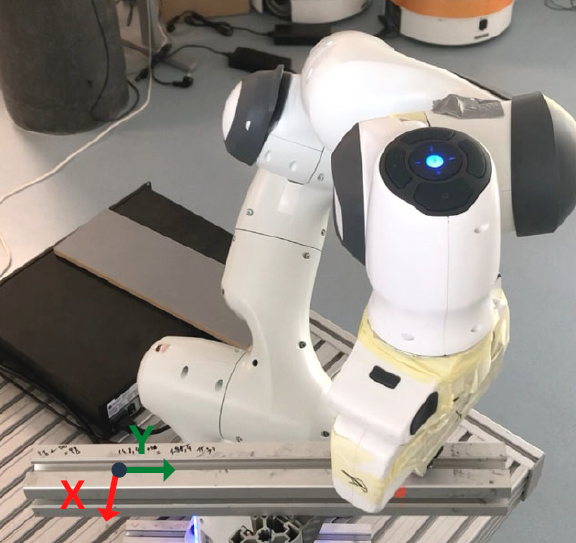
abstract = {This paper presents a method for estimating contact points on an extended robotic structure using only the built-in sensors of the Franka Emika Panda robot. The proposed approach combines a Kalman filter to mitigate sensor noise and a two-step optimization strategy, using global and local methods, to accurately determine contact positions.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a method for estimating contact points on an extended robotic structure using only the built-in sensors of the Franka Emika Panda robot. The proposed approach combines a Kalman filter to mitigate sensor noise and a two-step optimization strategy, using global and local methods, to accurately determine contact positions.
@inproceedings{10.1007/978-3-032-02106-9_53,
title = {Human-Human Teleoperated Interaction for Sit-to-Stand Assistance with Humanoid Robots},
author = {Tilen Brecelj and Ana Gabriela Kostanjevec and Tadej Petrič},
editor = {Kosta Jovanović and Aleksandar Rodić and Mirko Raković},
isbn = {978-3-032-02106-9},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {Advances in Service and Industrial Robotics},
pages = {477–485},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {In this study, we investigate physical collaboration between two individuals during sit-to-stand assistance, facilitated by two coupled robots, the anthropomorphic KUKA LWR robot and the humanoid robot Talos. First, a haptic controller based on the forces applied to both robots to establish the connection between the two individuals is described. Subsequently, physical human-human collaboration during a sit-to-stand task is presented and analysed. Lastly, a generalisation of the sit-to-stand assisted movement task obtained through teleoperation is provided for potential enhancements of the sit-to-stand assistance task.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
In this study, we investigate physical collaboration between two individuals during sit-to-stand assistance, facilitated by two coupled robots, the anthropomorphic KUKA LWR robot and the humanoid robot Talos. First, a haptic controller based on the forces applied to both robots to establish the connection between the two individuals is described. Subsequently, physical human-human collaboration during a sit-to-stand task is presented and analysed. Lastly, a generalisation of the sit-to-stand assisted movement task obtained through teleoperation is provided for potential enhancements of the sit-to-stand assistance task.
@inproceedings{10.1007/978-3-031-59257-7_44,
title = {RobotBlockSet (RBS)—A Comprehensive Robotics Framework},
author = {Leon Žlajpah and Tadej Petrič},
editor = {Doina Pisla and Giuseppe Carbone and Daniel Condurache and Calin Vaida},
isbn = {978-3-031-59257-7},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Advances in Service and Industrial Robotics},
pages = {439–450},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {In this paper, we present the comprehensive robotics framework RBS, which addresses the critical need for seamless integration between simulation and real-world execution in robotics. The proposed framework provides a unified solution for designing, testing, and executing robotic applications, bridging the gap between virtual and physical environments. By providing interfaces for various simulators and real robots, along with tools for robot modeling, motion planning, and execution, RBS streamlines the development process. It removes the complexity associated with the transition from simulation to real systems, shortens development times and enables fast and efficient design iterations. This innovative framework holds great promise for advancing robotics research and development. It enables researchers and engineers to realise the full potential of simulation and real-world testing in the development of state-of-the-art robotic systems.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we present the comprehensive robotics framework RBS, which addresses the critical need for seamless integration between simulation and real-world execution in robotics. The proposed framework provides a unified solution for designing, testing, and executing robotic applications, bridging the gap between virtual and physical environments. By providing interfaces for various simulators and real robots, along with tools for robot modeling, motion planning, and execution, RBS streamlines the development process. It removes the complexity associated with the transition from simulation to real systems, shortens development times and enables fast and efficient design iterations. This innovative framework holds great promise for advancing robotics research and development. It enables researchers and engineers to realise the full potential of simulation and real-world testing in the development of state-of-the-art robotic systems.
@inproceedings{10.1007/978-3-031-59257-7_33,
title = {A Novel Approach Exploiting Contact Points on Robot Structures for Enhanced End-Effector Accuracy},
author = {Jan Šifrer and Tadej Petrič},
editor = {Doina Pisla and Giuseppe Carbone and Daniel Condurache and Calin Vaida},
isbn = {978-3-031-59257-7},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Advances in Service and Industrial Robotics},
pages = {329–336},
publisher = {Springer Nature Switzerland},
address = {Cham},
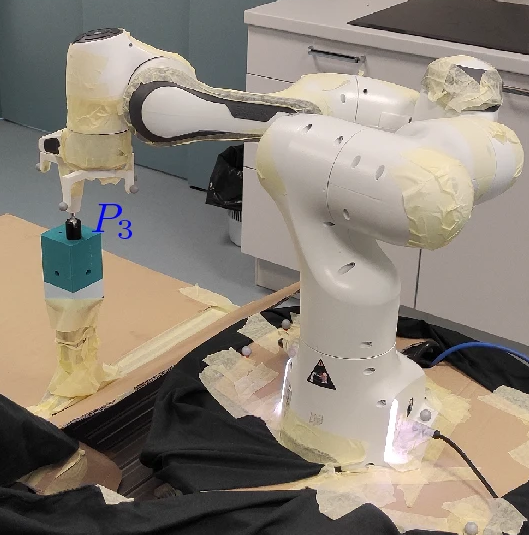
abstract = {In this paper, we propose a novel approach that leverages contact points on the robot's structure to significantly enhance the precision of robotic mechanisms. This method involves a detailed analysis of how strategic contact utilization can lead to improved accuracy in robotic operations. Through experimental validation and comparative studies, we demonstrate the efficacy of this technique in refining the performance of robotic systems. Our findings highlight the potential of this approach in optimizing robotic functionality, opening new avenues for advanced robotic applications in various fields.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
In this paper, we propose a novel approach that leverages contact points on the robot's structure to significantly enhance the precision of robotic mechanisms. This method involves a detailed analysis of how strategic contact utilization can lead to improved accuracy in robotic operations. Through experimental validation and comparative studies, we demonstrate the efficacy of this technique in refining the performance of robotic systems. Our findings highlight the potential of this approach in optimizing robotic functionality, opening new avenues for advanced robotic applications in various fields.
In: Petrič, Tadej; Ude, Aleš; Žlajpah, Leon (Ed.): Advances in Service and Industrial Robotics, pp. 255–263, Springer Nature Switzerland, Cham, 2023, ISBN: 978-3-031-32606-6.
@inproceedings{10.1007/978-3-031-32606-6_30,
title = {Optimizing Robot Positioning Accuracy with Kinematic Calibration and Deflection Estimation},
author = {Leon Žlajpah and Tadej Petrič},
editor = {Tadej Petrič and Aleš Ude and Leon Žlajpah},
url = {https://link.springer.com/10.1007/978-3-031-32606-6_30},
doi = {10.1007/978-3-031-32606-6_30},
isbn = {978-3-031-32606-6},
year = {2023},
date = {2023-01-01},
booktitle = {Advances in Service and Industrial Robotics},
pages = {255--263},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {To achieve higher positioning accuracy, it is common practice to calibrate the robot. An essential part of the calibration is the estimation of the kinematic parameters. Due to various nonlinear influences on the end-effector position accuracy, such as joint and link flexibility, standard methods of identifying kinematic parameters do not always give a satisfactory result. In this paper, we propose a strategy that considers deflection-dependent errors to improve the overall positioning accuracy of the robot. As joint/link deflections mainly depend on gravity, we include the compensation of gravity-induced errors in the estimation procedure. In the first step of the proposed strategy, we compute the joint position errors caused by gravity. In the next step, we apply an existing optimization method to estimate the kinematic parameters. We propose to use an optimization based on random configurations. Such an approach allows good calibration even when we want to calibrate a robot in a bounded workspace. Since calibration is generally time consuming, we investigated how the number of measured configurations influences the calibration. To evaluate the proposed method, we used a simulation of the collaborative robot Franka Emika Panda in MuJoCo.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
To achieve higher positioning accuracy, it is common practice to calibrate the robot. An essential part of the calibration is the estimation of the kinematic parameters. Due to various nonlinear influences on the end-effector position accuracy, such as joint and link flexibility, standard methods of identifying kinematic parameters do not always give a satisfactory result. In this paper, we propose a strategy that considers deflection-dependent errors to improve the overall positioning accuracy of the robot. As joint/link deflections mainly depend on gravity, we include the compensation of gravity-induced errors in the estimation procedure. In the first step of the proposed strategy, we compute the joint position errors caused by gravity. In the next step, we apply an existing optimization method to estimate the kinematic parameters. We propose to use an optimization based on random configurations. Such an approach allows good calibration even when we want to calibrate a robot in a bounded workspace. Since calibration is generally time consuming, we investigated how the number of measured configurations influences the calibration. To evaluate the proposed method, we used a simulation of the collaborative robot Franka Emika Panda in MuJoCo.
@mastersthesis{nokey,
title = {Studying control approaches for redundant robotic mechanisms},
author = {Šifrer, Jan},
editor = { Knez, Marjetka and Tadej Petrič },
url = {https://repozitorij.uni-lj.si/IzpisGradiva.php?id=150700},
year = {2023},
date = {2023-09-21},
urldate = {2023-09-21},
school = {FMF - Fakulteta za matematiko in fiziko},
abstract = {In this master's thesis, we will explore how to control a redundant robotic mechanism. We will begin by providing some definitions to describe what a redundant robotic mechanism is. Further we will explain that there are two essential spaces for a redundant robotic mechanism, which we will also mathematically describe. The first space pertains to the joints, while the second space relates to the tasks the mechanism is intended to perform. We will introduce the fundamental equation that describes how to map from the joint space to the task space, known as the direct kinematic equation. Additionally, we will learn about rotation matrices and discuss three approaches for generating them. Furthermore, we will proceed with a section dedicated to the inverse kinematic equation, which relates to the mapping from the task space back to the joint space. Inverse kinematics enables us to control a redundant robotic mechanism. In a second part of the thesis, we will define problems that we aim to solve and illustrate with examples how to solve them. To deepen the understanding, we will initially explore examples in a two-dimensional space, and subsequently, we will investigate solutions in a three-dimensional space, which we will implement also on an actual robot for practical application},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
In this master's thesis, we will explore how to control a redundant robotic mechanism. We will begin by providing some definitions to describe what a redundant robotic mechanism is. Further we will explain that there are two essential spaces for a redundant robotic mechanism, which we will also mathematically describe. The first space pertains to the joints, while the second space relates to the tasks the mechanism is intended to perform. We will introduce the fundamental equation that describes how to map from the joint space to the task space, known as the direct kinematic equation. Additionally, we will learn about rotation matrices and discuss three approaches for generating them. Furthermore, we will proceed with a section dedicated to the inverse kinematic equation, which relates to the mapping from the task space back to the joint space. Inverse kinematics enables us to control a redundant robotic mechanism. In a second part of the thesis, we will define problems that we aim to solve and illustrate with examples how to solve them. To deepen the understanding, we will initially explore examples in a two-dimensional space, and subsequently, we will investigate solutions in a three-dimensional space, which we will implement also on an actual robot for practical application
N2-0269 Dinamična več kontaktna interakcija celega telesa za izboljšanje natančnosti manipulacije N2-0269 Rethinking Dynamic Whole-body Multicontact Interaction: Towards Next Generation of Collaborative Robots
Significance for the Development of Science (BodyCoM)
The BodyCoM project advances the theoretical foundations of whole-body multi-contact interaction in robotics, moving beyond the classical paradigm in which manipulation is confined to the end-effector. It establishes a formalized framework in which the robot’s entire kinematic structure is treated as a distributed carrier of mechanical constraints and contact forces. In this perspective, whole-body contacts are not incidental effects of interaction with the environment, but integral, system-level components of the manipulation strategy.
A central scientific contribution lies in systematically linking mechanical system properties—Cartesian stiffness, compliance, and elastic deflections—with absolute geometric accuracy and control design in contact-rich scenarios. The research demonstrates that high absolute accuracy is a prerequisite for rigorous analysis of multi-contact configurations. This insight has led to the development of advanced kinematic calibration procedures and structural deflection compensation methods, deepening the understanding of how model uncertainties and mechanical compliance influence the stability and determinacy of multi-contact states.
The project further contributes by introducing functionally adapted Cartesian stiffness shaping and extending impedance control concepts to distributed contacts along the robot structure. By enabling contact point estimation based solely on internal joint torque sensing, the framework eliminates the need for external sensing infrastructure. Mechanical modeling, contact estimation, and control synthesis are unified into a coherent conceptual structure for addressing complex, contact-rich tasks.
Through these advances, BodyCoM strengthens an emerging research direction focused on the fundamental principles of interaction robotics, particularly in redundant systems, multi-contact stabilization, and goal-directed control in complex mechanical environments.
Significance for the Development of Slovenia (BodyCoM)
BodyCoM reinforces Slovenia’s scientific and technological excellence in advanced robotics and supports the objectives of the national Smart Specialisation Strategy, especially in the domains of Factories of the Future, advanced manufacturing technologies, and industrial digital transformation. The project consolidates national competencies at the intersection of mechanics, control engineering, and interaction robotics, strengthening Slovenia’s position within the European research landscape in collaborative robotic systems.
The developed concepts of whole-body multi-contact manipulation, enhanced absolute accuracy, and advanced kinematic calibration form a scientific basis for high value-added technological solutions. Particularly important is the reliance on internal sensing only, without costly external measurement systems, which significantly improves transferability to Slovenian industry—especially small and medium-sized enterprises. This directly supports Industry 4.0 implementation, flexible automation, and safe human–robot collaboration.
The project also contributes to the long-term development of national research capacity. Master’s theses completed within the project and continued doctoral-level research strengthen Slovenia’s expertise in advanced robot control and multi-contact interaction. This establishes a sustainable knowledge base for future high-technology development and facilitates integration into international research initiatives and value chains.
More broadly, the research supports the development of robotic systems capable of enabling safer, more adaptive, and more efficient work processes—an important factor in addressing demographic change and workforce shortages. BodyCoM therefore contributes not only to scientific progress, but also to Slovenia’s sustainable technological development and international competitiveness as an innovation-driven economy.